Junhao Gong
PhD Student at Tsinghua University

Tsinghua SIGS
Shenzhen, China
gongjh24@mails.tsinghua.edu.cn
I am Junhao Gong (龚俊豪), a PhD student at the Smart Sensing and Robotics (SSR) Group, Tsinghua Shenzhen International Graduate School, supervised by Prof. Wenbo Ding and Prof. Xiaojun Liang.
Education
-
Ph.D. in Electronic Information (2024 - Present)
Tsinghua Shenzhen International Graduate School, Tsinghua University
Supervisors: Prof. Wenbo Ding and Prof. Xiaojun Liang -
B.Eng. in Electronic Information Engineering (2020 - 2024)
Harbin Institute of Technology
Research Interests
I aim to become a full-stack robotics engineer, building robotic systems that connect sensing, manipulation, control, hardware integration, and real-world deployment. My current research focuses on tactile perception and contact-rich robotic manipulation:
- Tactile Perception: Developing tactile sensing methods that help robots perceive contact, force, and material interactions
- Tactile-guided Manipulation: Using tactile feedback to improve grasping, suction-based manipulation, and other contact-rich robot operations
Internship
- Robotic Manipulation Intern, Sharpa (Mar. 2026 - Present)
Working on in-hand manipulation for robotic hands.
News
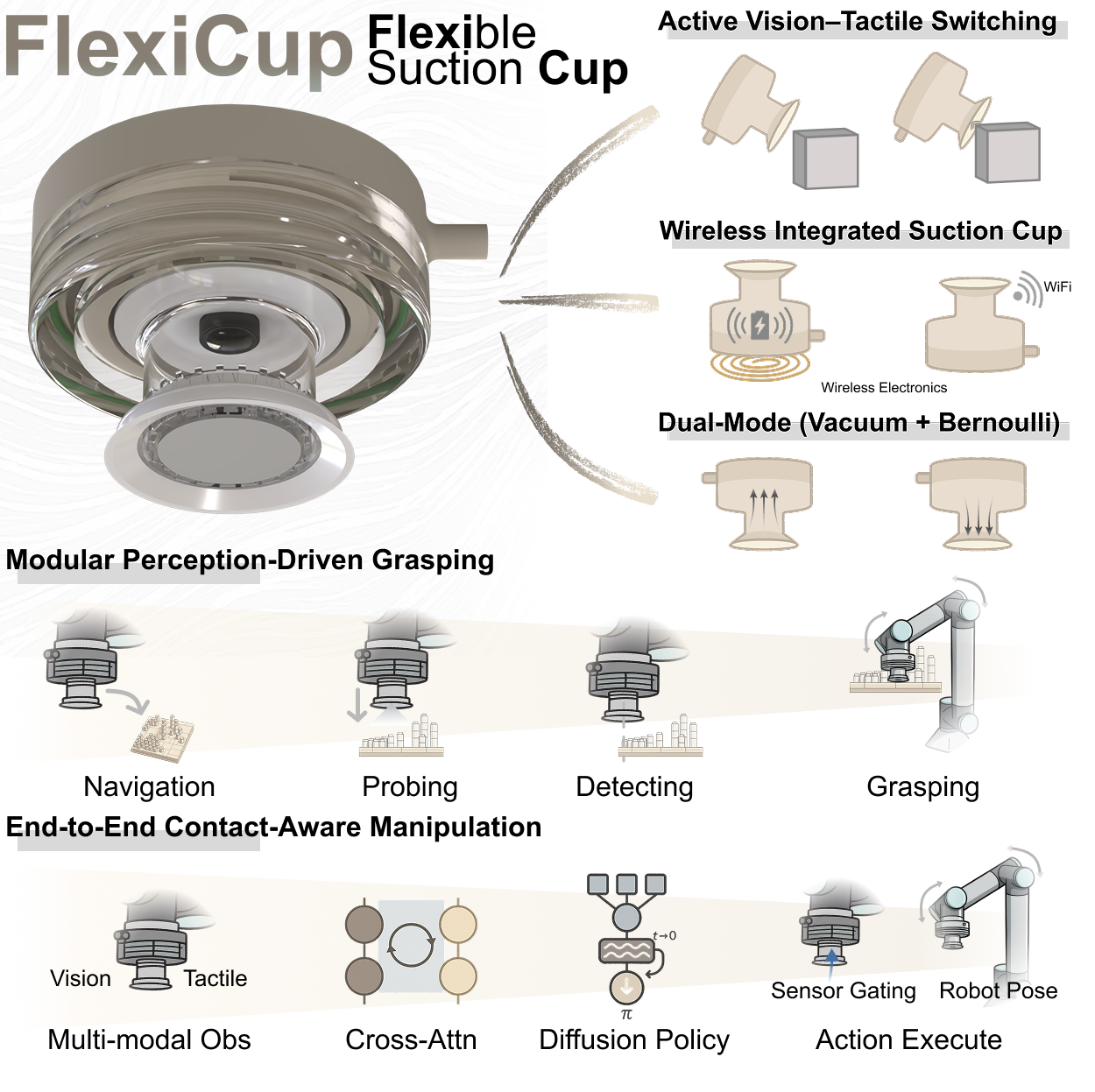
| Mar 2026 | Our paper FlexiCup has been accepted to IEEE Robotics and Automation Letters (RAL)!🎉 |
|---|---|
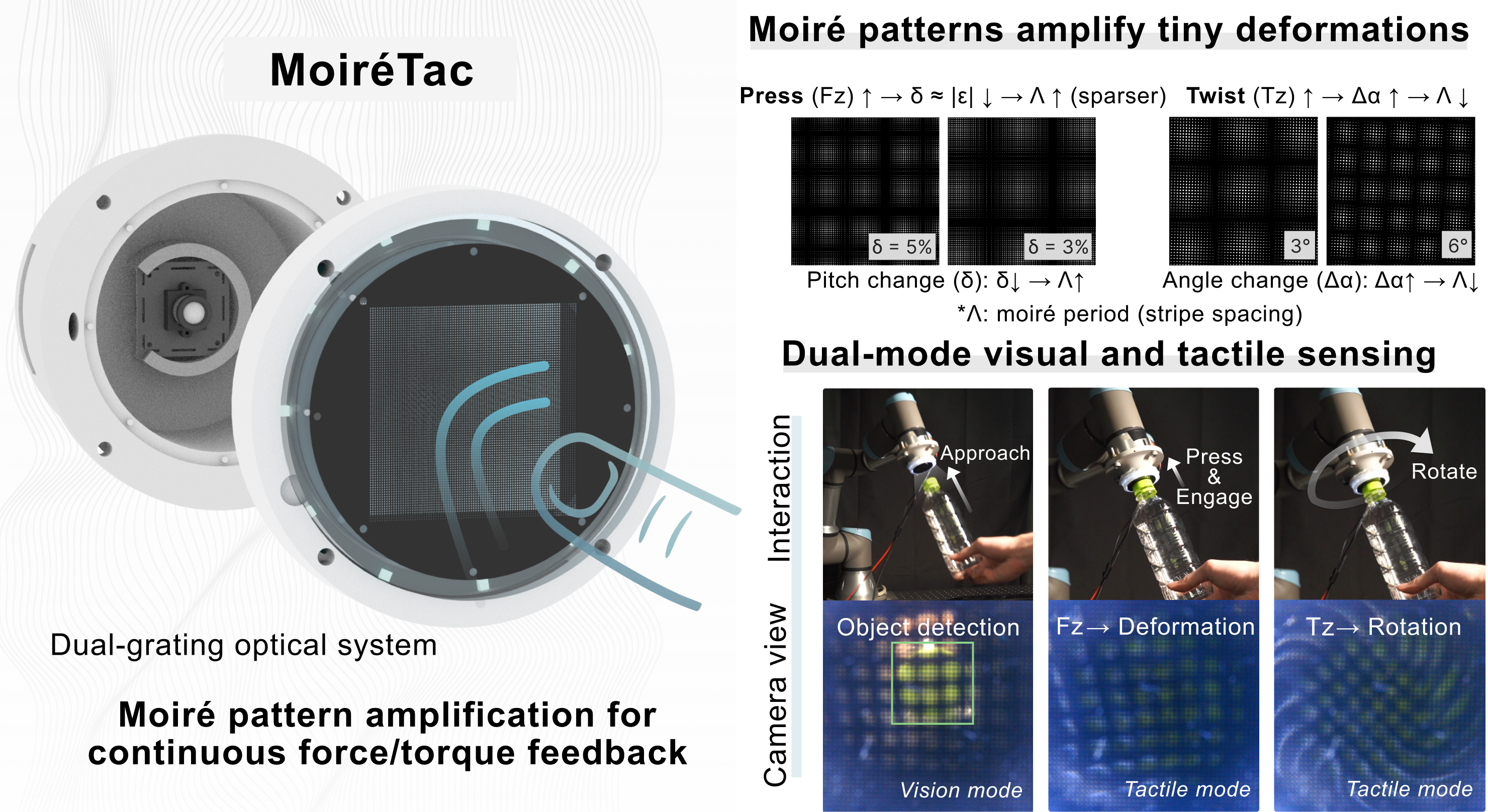
| Feb 2026 | 🎉 Our paper MoiréTac was accepted to ICRA 2026! See you in Vienna! |
| Sep 2025 | Our paper on magnetic field-enhanced soft robots was published as a Cover Article in Science Advances! 🎉 |
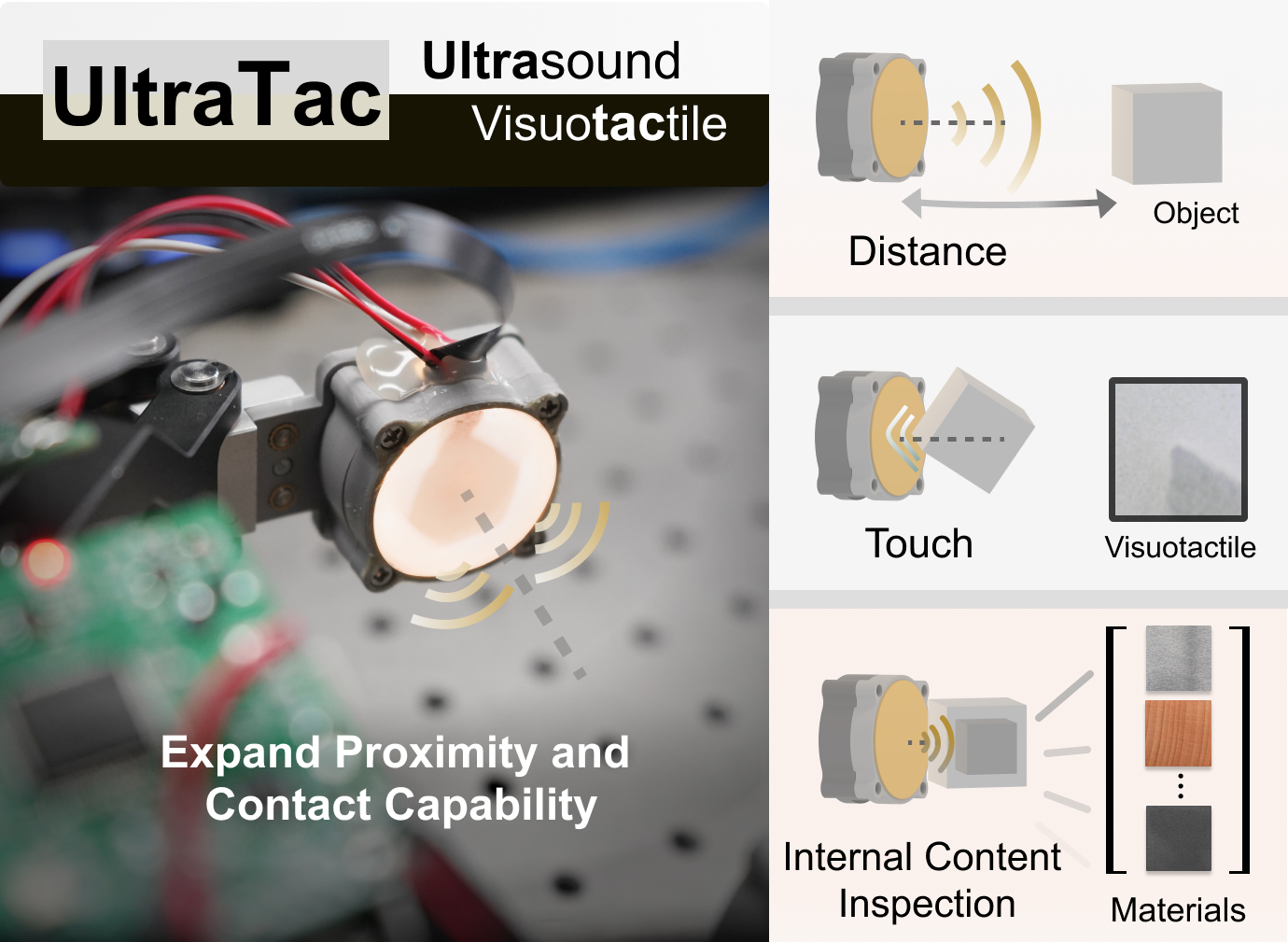
| Jun 2025 | 🎉 Our paper UltraTac was accepted to IROS 2025! See you in Hangzhou! |
| Mar 2025 | I will be visiting the United Kingdom from March to April 2025 for an academic exchange program funded by Tsinghua University. |